Ted Wang a master of none
Small Indoor Safe Quadcopter

This is a small drone that I have designed and built from scratch. It is small and light enough so that I can test some of the control and learning method that I am investigating. I had a lot of helps from The McGill aerospace mechatronics Lab. Thanks a lot! Everything about this project (including design, soldering, 3d printing, building, machining, and testing) was so much fun!
Goal
Montreal is a super cold city in case you didn’t know it. Testing new control and learning algorithms outside was not an enjoyable experience during winter. The goal of this project is to design and build a small drone that can be flown indoor and has enough computation power to ran algorithms and process images.
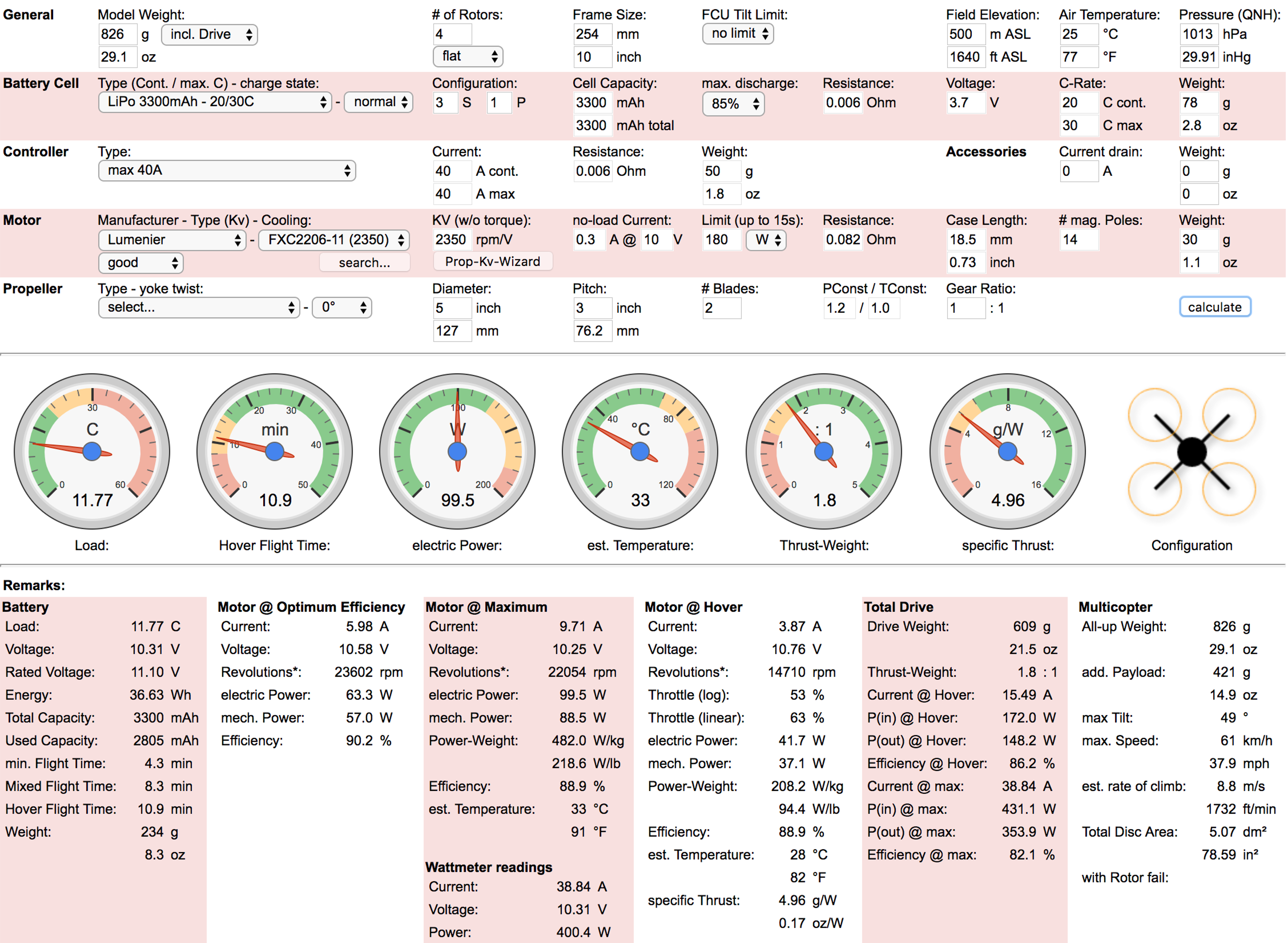
Estimations
I like to make a quick estimation of the parameters of my design before start sketching things. Some of the important parameters that we need to consider in this design are thrust, weight, size, aerodynamics, and hovering time. Here is a quick calculation to all these concern:
Conceptual design
Here is the exciting part! Design whatever I want within the constraints drawn from the estimations above. Of course I came up first with something crazy like this:
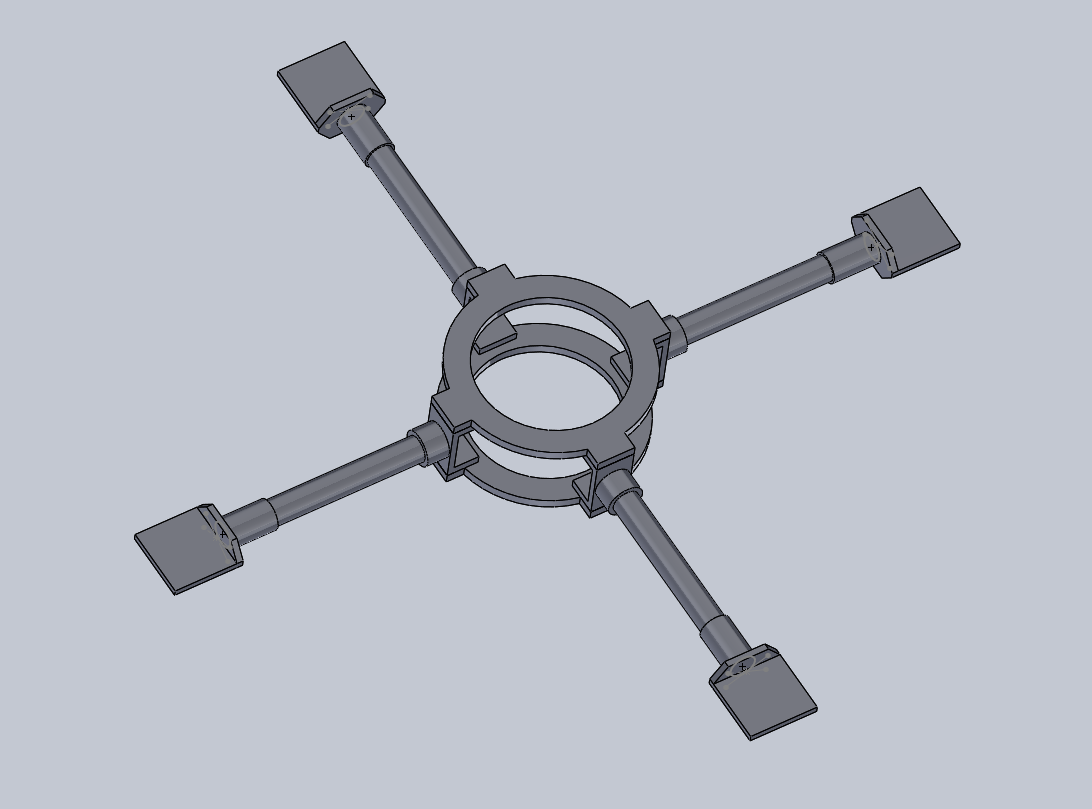
Then, as always, I need to be more realistic… This is a “better” conceptual design:
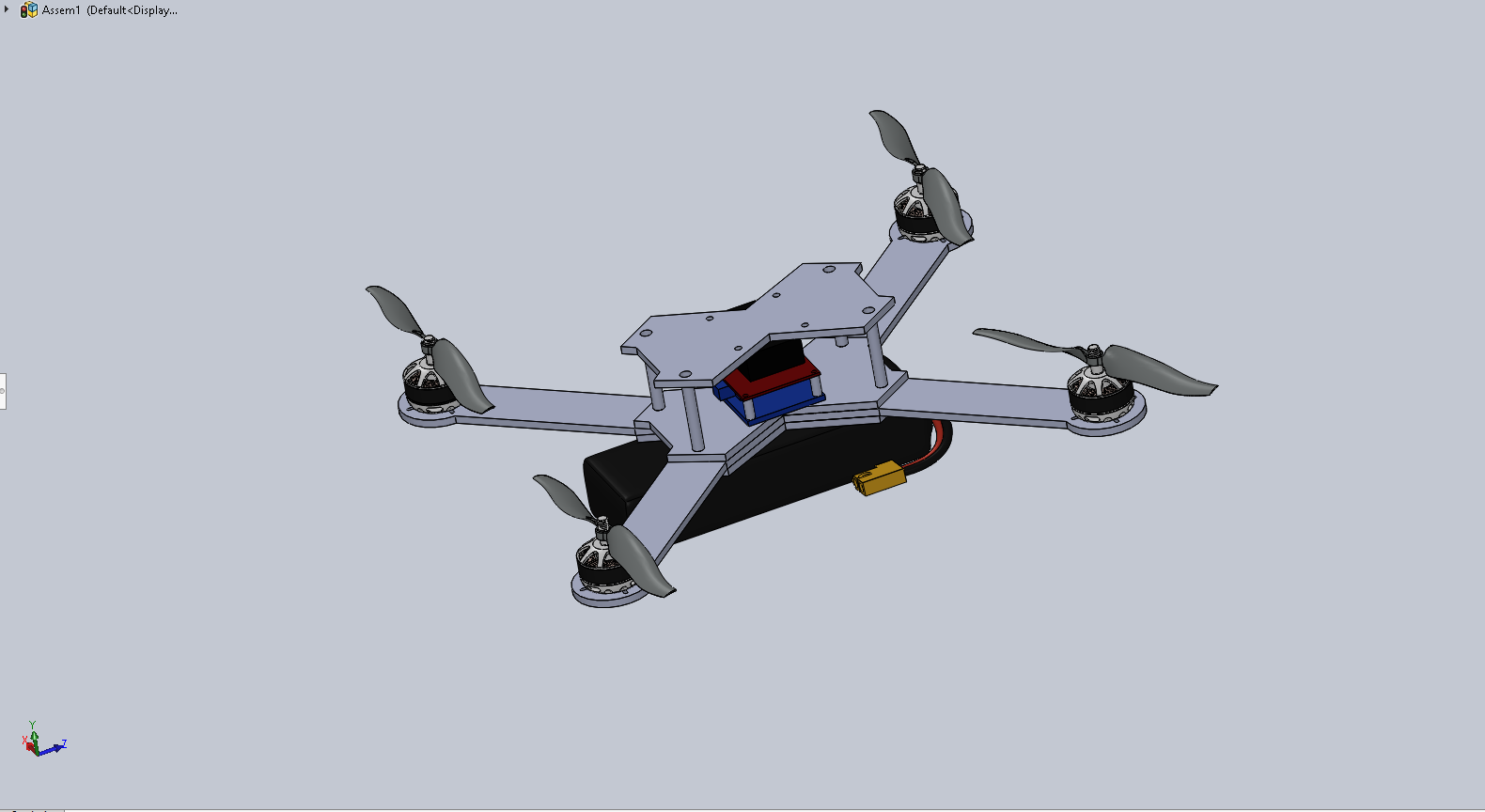
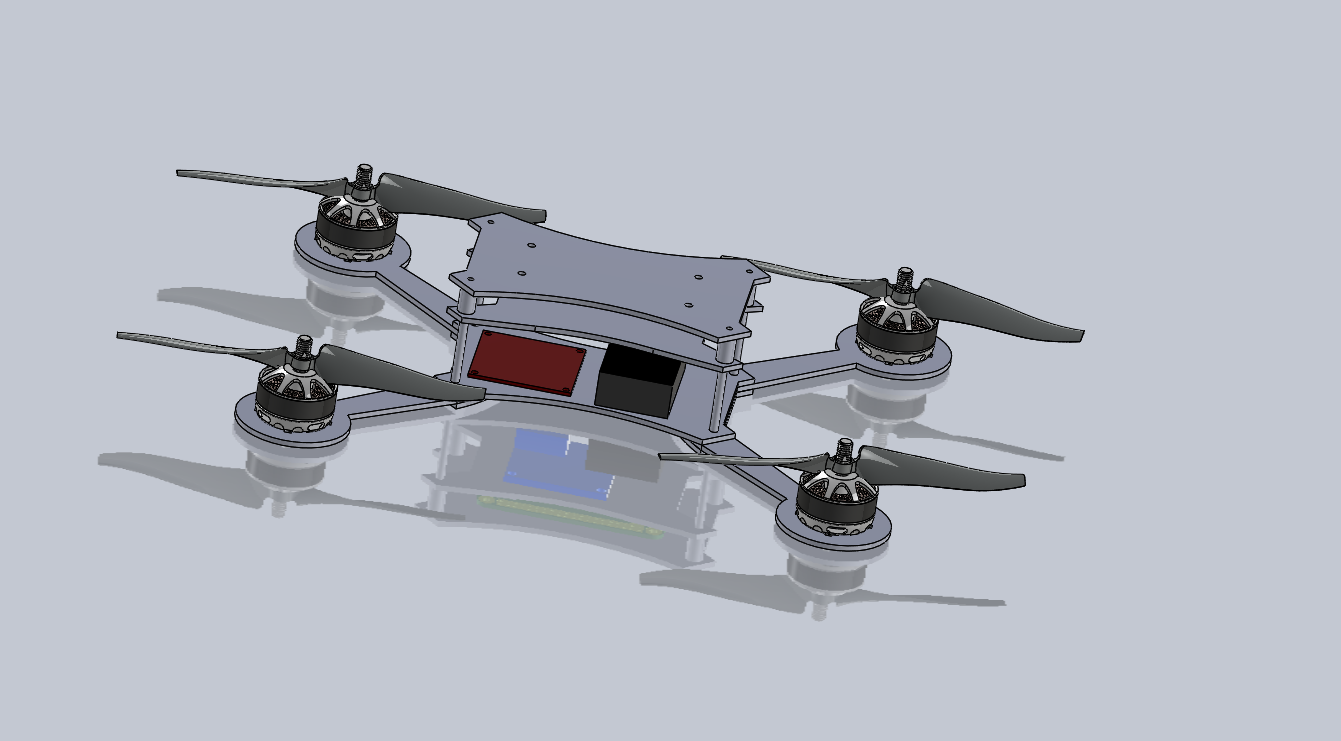
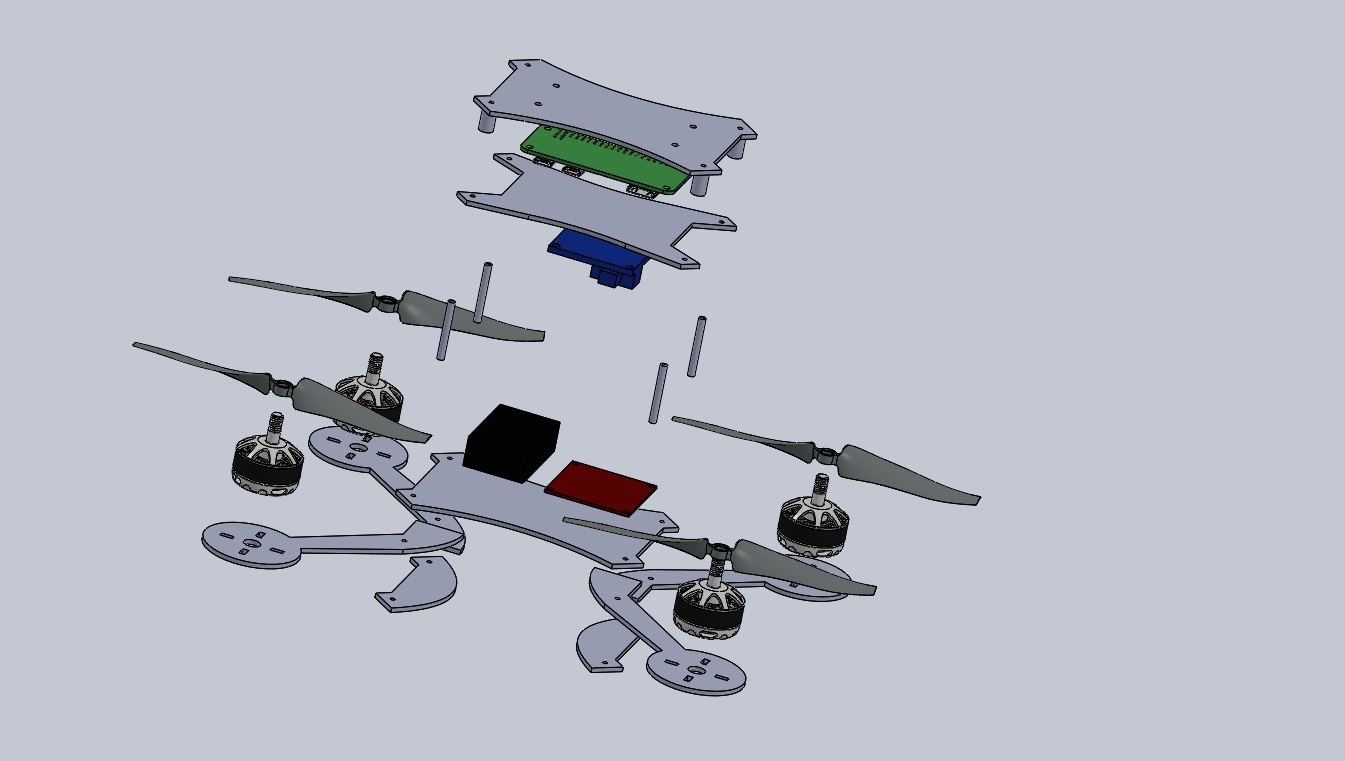
And this is the final conceptual design:
Ordering parts
As much as I want to build everything, I just don’t have the time to build a motor or micro controller… So I needed to order some parts online. Here is my order list:
-
Controller: pixracer
-
ESC board: Racerstar Special Anniversary Edition 35A BLheli_S 4-in-1 ESC
-
Tracker: Otus
-
Motor x 4: Lumenier RX2206-11 2350Kv Motor
-
Receiver: Frsky receiver
-
Battery: Lumenier 3300mAh 3s 35c Lipo Battery
-
Propeller x 4: Gemfan 5x3 Carbon Nylon Propeller - 2 Blade (Set of 4 - Black)
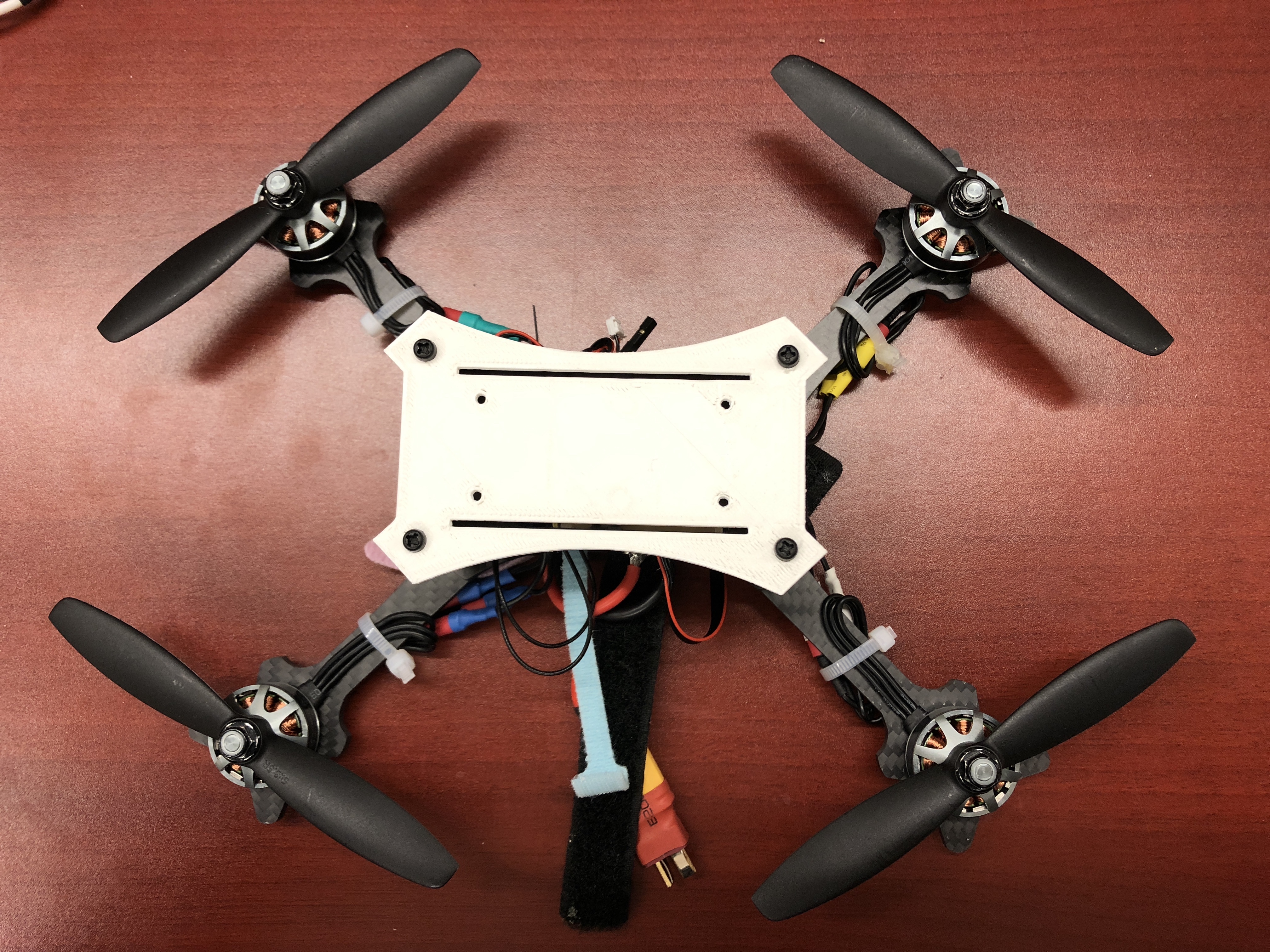
Prototype Building
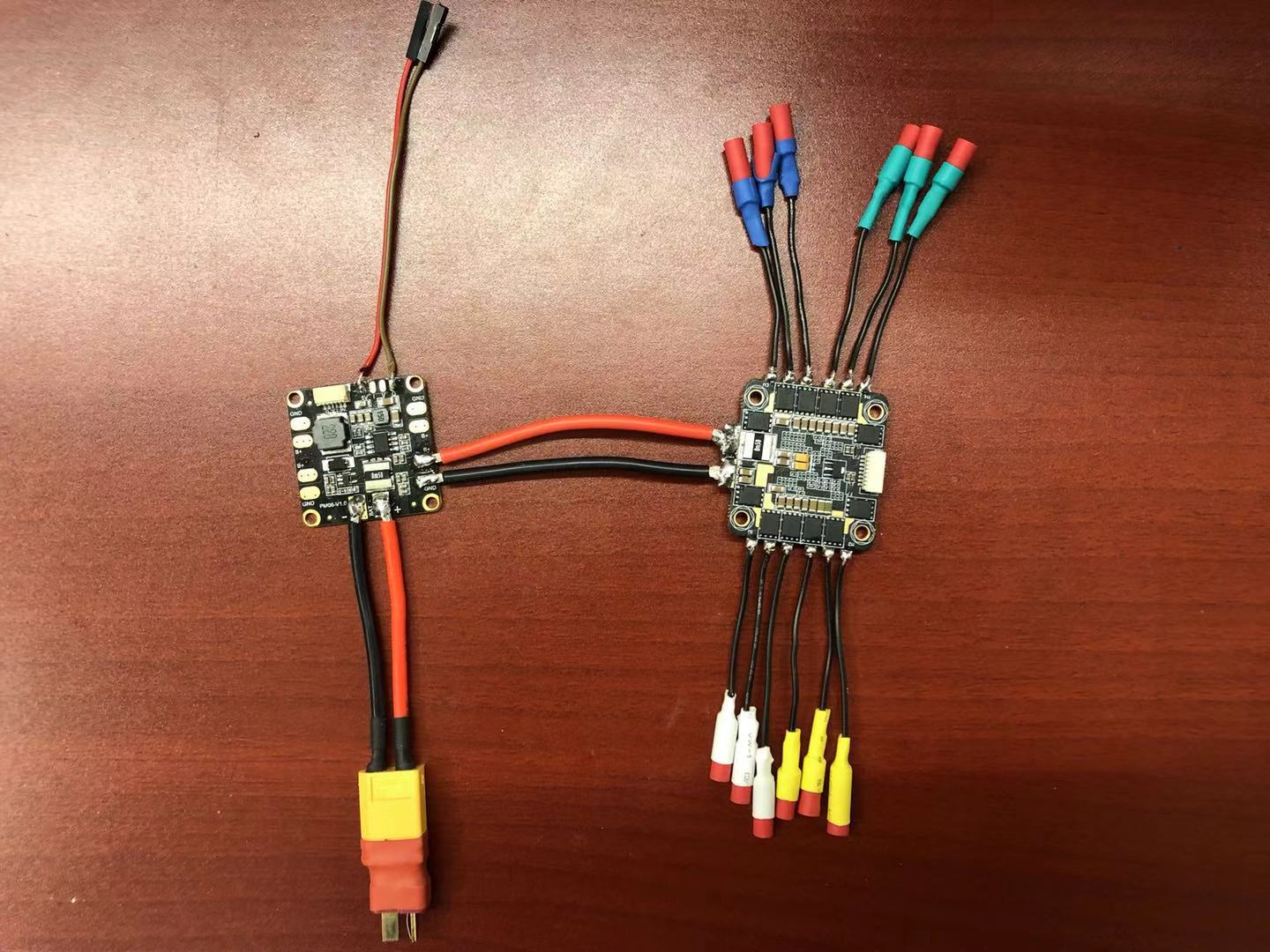
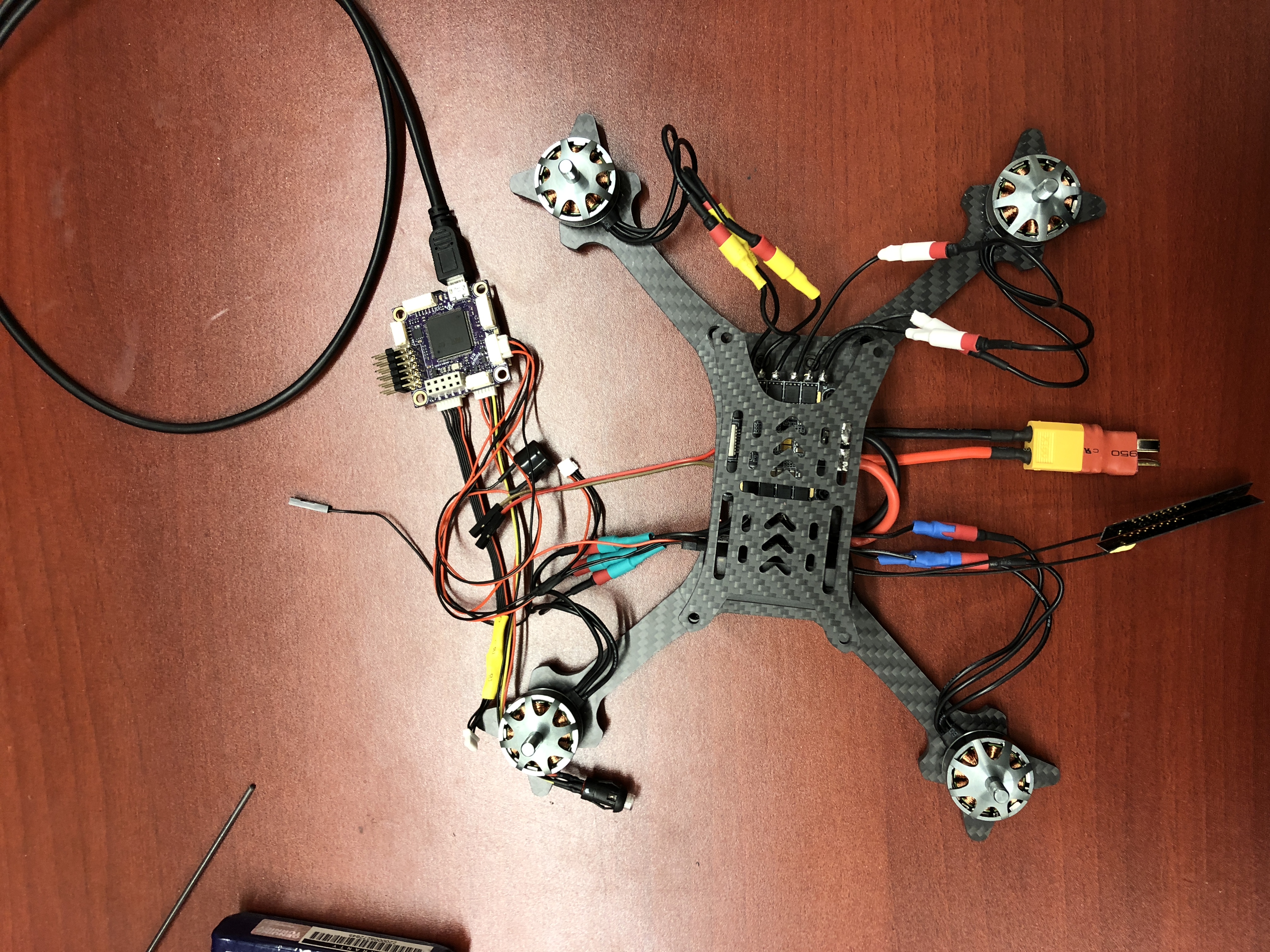
The building process… How should I put it? I don’t want to go too much into details, but all you have to know is that it was magical. Here are some pictures to give you a taste of it.

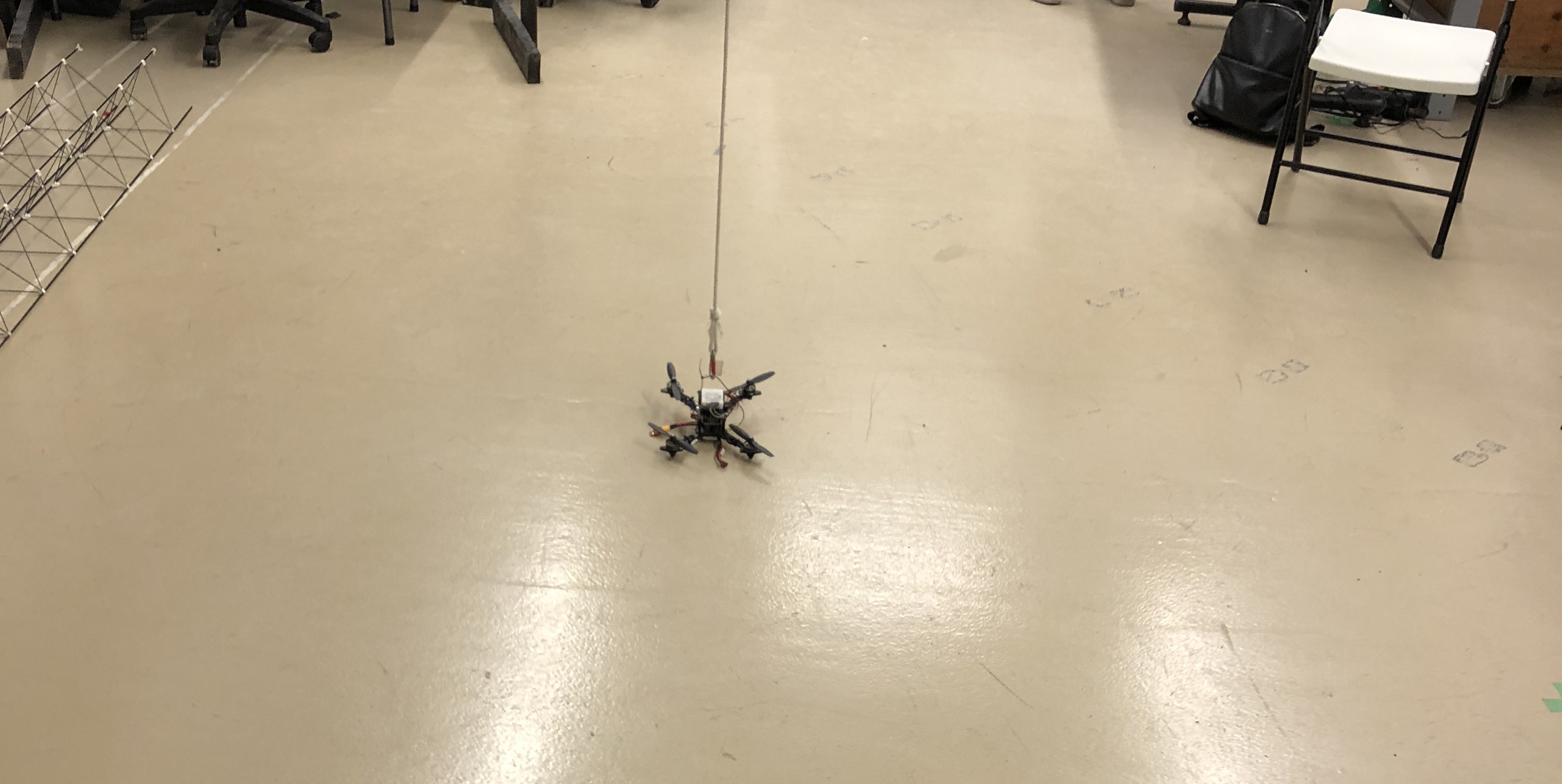
Testing
Guess how I tested it? The hang test of course…
Validation
Now, let’s check by how much our estimations were off from the real data
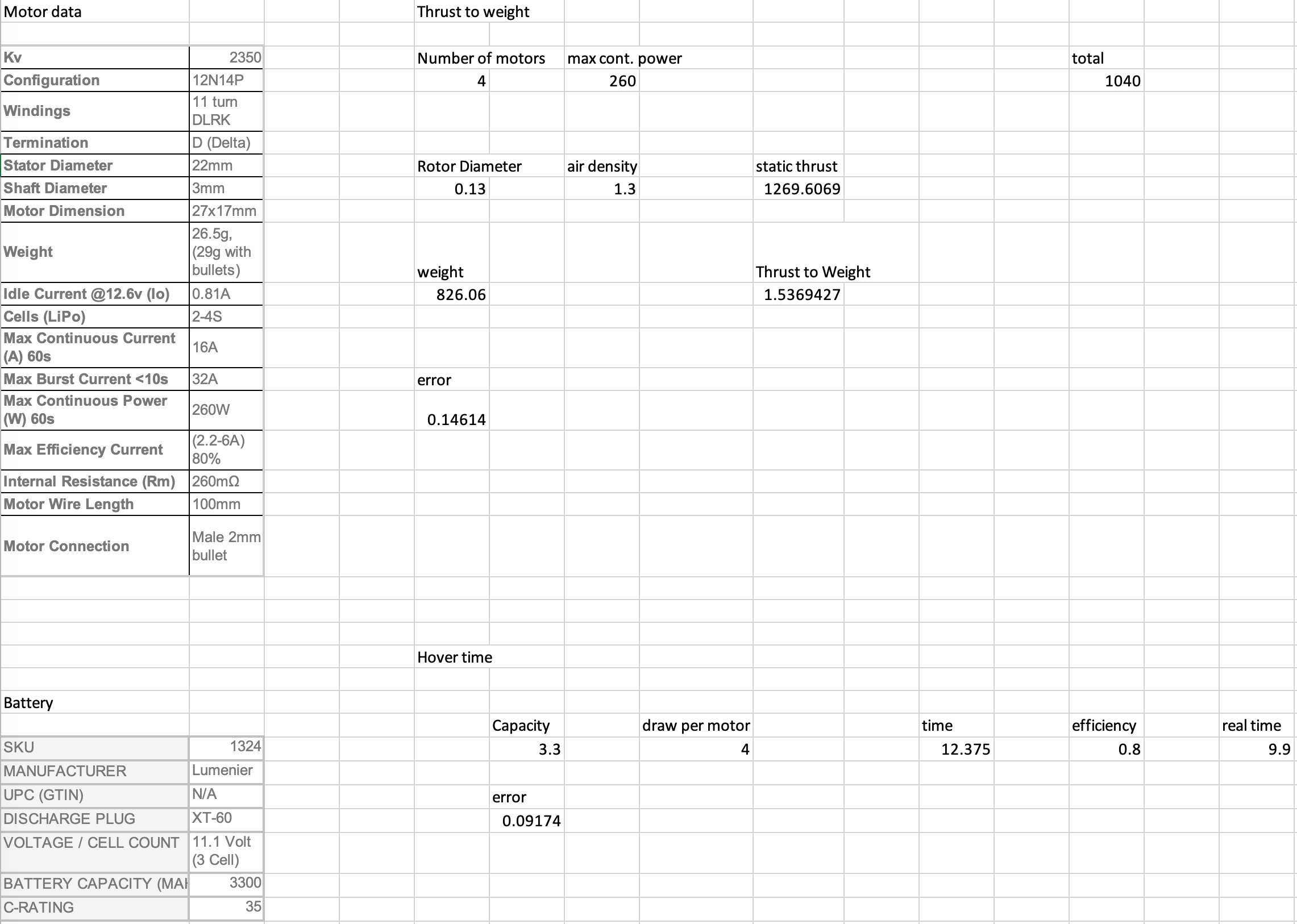
Not bad at all eh?!
Video
Do you want to see how it performs? Click here to see a flight test!
Written on January 4th, 2018 by Ted Wang